





































































 Home
Home
SAgro200
Auto-Steering System
Auto-Steering System
learn more









































 2025-11-04
2025-11-04
 Jericho
Jericho






Following our previous blog on how to select the correct vehicle model in the SAgro-Series autosteer system, many users have asked how to properly adjust autosteer parameters for different types of machinery.
Different vehicle models use different control algorithms, and fine-tuning the parameters can significantly improve steering accuracy and stability.
In this blog, we'll share some recommended default parameter settings and adjustment tips that work well for common vehicle types.
Before starting, make sure you have the following ready:
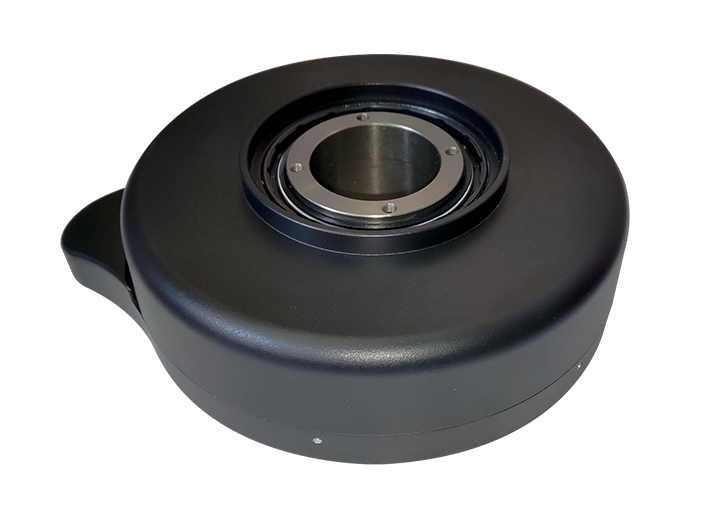
All autosteer components installed and cables properly connected
The system tablet with autosteer software installed
Path: System >> Auto-steering >> Setting
Control Mode: Select Mode 3
Transmission Coefficient: Set to 148
(The higher the vehicle's horsepower, the greater the transmission coefficient — up to 300.)

Path: System >> Auto-steering >> Motor
Rotating Speed: This defines the motor's response speed.
A higher value increases the correction frequency but may cause instability.
Recommended range: 8-15, with 12 as the default for stable performance.

Path: System >> Auto-steering >> Setting
Foresight Distance:
Controls how fast lateral errors are corrected.
Smaller value → faster convergence, but may cause left-right oscillation
Larger value → more stable, but slower convergence
Recommended default: 60, adjustable as needed.
Fixed Mode:
Keeps the foresight distance fixed. This option should be enabled.
Lateral Slope Compensation:
Compensates for vehicle misalignment on uneven or sloped ground.
Enable this option if your working area is not flat.
Auto-calibration:
The system motherboard automatically corrects the azimuth angle.
This feature should remain enabled.
Low-speed Mode:
When the vehicle operates below 2 km/h, enable this option to allow the algorithm to compensate for low-speed movement.

Control Mode: Mode 2
Range:
Controls steering stability.
If the vehicle sways excessively, decrease the value.
If error convergence is too slow, increase it.
Default: 12
Frequency:
Reduces the steering wheel's turning speed in advance.
If the wheel turns too quickly or oscillates excessively, increase this value.
Oline Value:
Defines the actual center position of the vehicle on the navigation line.
Default: 9

Path: System >> Auto-steering >> Motor
Speed Control:
Adjusts the motor response speed according to vehicle speed.
When position control is used, the response will be slower.
Manual Steering Override:
Defines how much force is required for the user to manually turn the steering wheel and exit the autopilot mode.
Recommended default: 9

Path: System >> Auto-steering >> Setting

Foresight Distance: Recommended value 25, adjustable according to field conditions.
For the meaning of other parameters, please refer to the sections above for four-wheel tractors and sprayer/harvester.
Please follow the parameter settings shown in the provided reference image.

Path: System >> Auto-steering >> Motor
Follow the same adjustment logic as described for the other vehicle types.
Refer to the images for recommended default settings.

The above parameters are based on data collected from field testing and provide good performance across typical working conditions.
However, optimal values may vary depending on vehicle condition, load, and terrain.
Use these parameters as baseline defaults and fine-tune them as needed for your specific equipment.
For further assistance or personalized guidance, please contact our support team at support@singularxyz.com.